SHARE
Most Innovative Project 2018: Railway Track Monitoring Robotic System
This new design of a railway track monitoring robotic system is one of the projects ennomotive has received to compete in the 'Most Innovative Project 2018' contest.
 The principal problem has been the lack of cheap and efficient technology to detect problems in the rail tracks and of course, the lack of proper maintenance of rails which have resulted in the formation of cracks in the rails and other similar problems caused by antisocial elements which expose the security of operation of rail transport. In the past, this problem has led to a number of derailments resulting in a heavy loss of life and property.
Cracks in rails have been identified to be the main cause of derailments in the past, yet there have been no cheap automated solutions available for testing purposes.
The principal problem has been the lack of cheap and efficient technology to detect problems in the rail tracks and of course, the lack of proper maintenance of rails which have resulted in the formation of cracks in the rails and other similar problems caused by antisocial elements which expose the security of operation of rail transport. In the past, this problem has led to a number of derailments resulting in a heavy loss of life and property.
Cracks in rails have been identified to be the main cause of derailments in the past, yet there have been no cheap automated solutions available for testing purposes.
 Flowchart
Flowchart
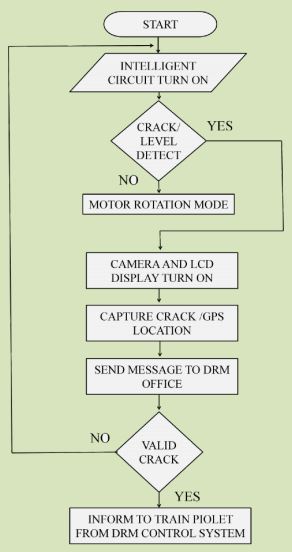
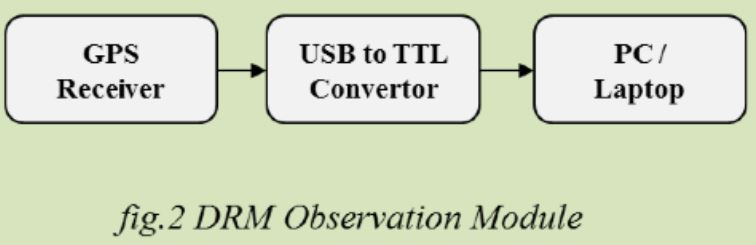
This railway track monitoring robotic system involves the design of crack finding robot for finding cracks in railway tracks. This system uses a controller for interfacing the robotic vehicle and crack detection sensor. The sensing device senses the voltage variations from the crack sensor and then it gives the signal to the microcontroller. The microcontroller checks the voltage variations between the measured value and the threshold value and controls the robot according to it. The robotic model is interfaced with the microcontroller with the help of a motor driver circuit. If any crack occurs in the rail, the robot will be stopped and then an SMS will be sent.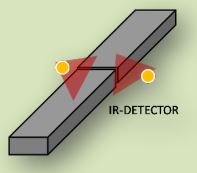 The wireless camera integrated into the robot system will take a photo of the damaged spot and GPS locator LCD display. Then, this image will be sent to a railway control room where it will be verified. If there is damage, an emergency message will alert the train driver of that particular railway route. If there is no damage, the robot will continue moving along the railway tracks.
The wireless camera integrated into the robot system will take a photo of the damaged spot and GPS locator LCD display. Then, this image will be sent to a railway control room where it will be verified. If there is damage, an emergency message will alert the train driver of that particular railway route. If there is no damage, the robot will continue moving along the railway tracks.
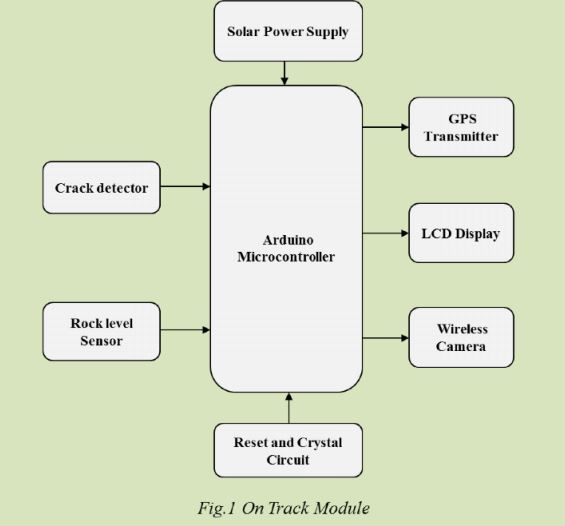
 For this project, several sensors, a motor, alert signal, and wireless camera have been used in order to accomplish an accurate and almost perfect monitoring of the railway tracks, if compared to the previous manually operated system. The main progress is this system is that unskilled workers do not push the trolley along the tracks anymore. Also, the identification of cracks was done by human sight and on the spot. However, this solar-powered robot uses a motor to move along the railway tracks and the monitoring is done under the supervision of skilled technical engineers with a wireless camera and a GPS system.
For this project, several sensors, a motor, alert signal, and wireless camera have been used in order to accomplish an accurate and almost perfect monitoring of the railway tracks, if compared to the previous manually operated system. The main progress is this system is that unskilled workers do not push the trolley along the tracks anymore. Also, the identification of cracks was done by human sight and on the spot. However, this solar-powered robot uses a motor to move along the railway tracks and the monitoring is done under the supervision of skilled technical engineers with a wireless camera and a GPS system.
Abstract
The Indian Railways has one of the largest railway networks in the world, crisscrossing over 1,15,000 km in distance, all over India. However, with regard to reliability and passenger safety Indian Railways is not up to global standards. Among other factors, cracks developed on the rails due to the absence of a timely detection and the associated maintenance pose serious questions on the security of operation of rail transport. A recent study revealed that over 25% of the track length is in need of replacement due to the development of cracks on it. Manual detection of tracks is cumbersome and not fully effective owing to much time consumption and requirement of skilled technicians. This project work is aimed at addressing the issue by developing an automatic railway track crack detection system. This work introduces a project that aims in designing robust railway crack detection scheme, A system which avoids the train accidents by detecting the cracks on railway tracks. And also capable of alerting the authorities in the form of SMS messages along with location by using GPS and GSM modules. The system also includes a distance measuring sensor which displays the track deviation distance between the railway tracks.Problem identification
According to a survey conducted through the years 2010-2017, there had been 895 people killed and 2123 people injured in a train derailment accident in India. The main cause of this accidents are the cracks on the railway track and an unstable rock level.
The principal problem has been the lack of cheap and efficient technology to detect problems in the rail tracks and of course, the lack of proper maintenance of rails which have resulted in the formation of cracks in the rails and other similar problems caused by antisocial elements which expose the security of operation of rail transport. In the past, this problem has led to a number of derailments resulting in a heavy loss of life and property.
Cracks in rails have been identified to be the main cause of derailments in the past, yet there have been no cheap automated solutions available for testing purposes.
Proposed system
In order to solve this problem, an autonomous mobile robot has been created. This robot will continuously run on the railway tracks for railway safety monitoring and save the priceless human lives in case of an accident. FlowchartThis railway track monitoring robotic system involves the design of crack finding robot for finding cracks in railway tracks. This system uses a controller for interfacing the robotic vehicle and crack detection sensor. The sensing device senses the voltage variations from the crack sensor and then it gives the signal to the microcontroller. The microcontroller checks the voltage variations between the measured value and the threshold value and controls the robot according to it. The robotic model is interfaced with the microcontroller with the help of a motor driver circuit. If any crack occurs in the rail, the robot will be stopped and then an SMS will be sent.
The wireless camera integrated into the robot system will take a photo of the damaged spot and GPS locator LCD display. Then, this image will be sent to a railway control room where it will be verified. If there is damage, an emergency message will alert the train driver of that particular railway route. If there is no damage, the robot will continue moving along the railway tracks.
Innovation
For this project, several sensors, a motor, alert signal, and wireless camera have been used in order to accomplish an accurate and almost perfect monitoring of the railway tracks, if compared to the previous manually operated system. The main progress is this system is that unskilled workers do not push the trolley along the tracks anymore. Also, the identification of cracks was done by human sight and on the spot. However, this solar-powered robot uses a motor to move along the railway tracks and the monitoring is done under the supervision of skilled technical engineers with a wireless camera and a GPS system.
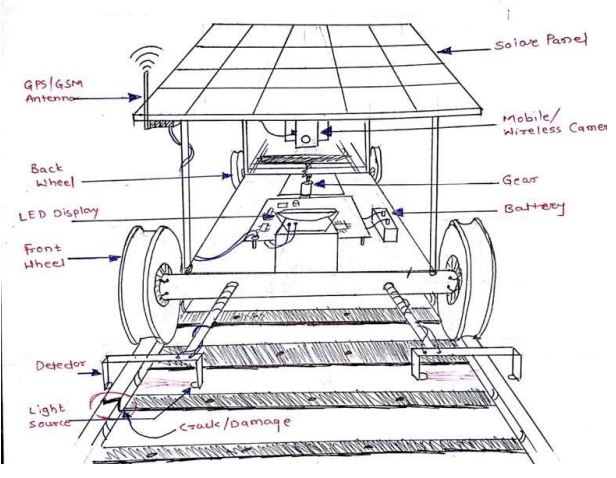
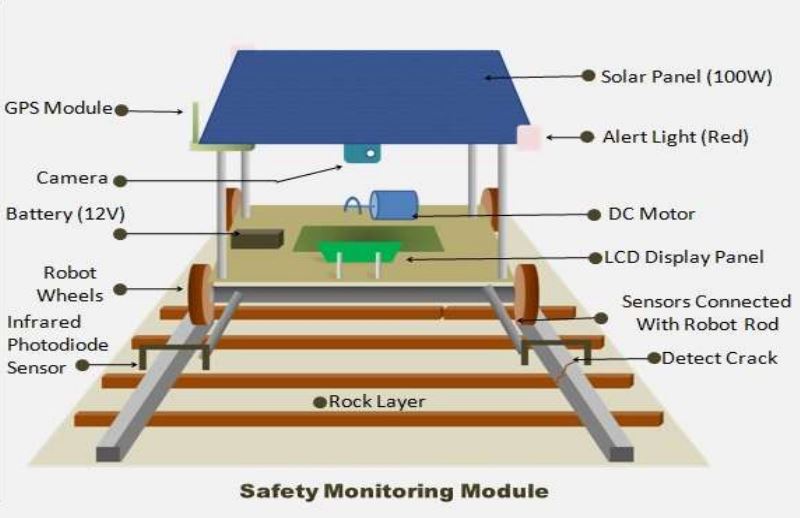
Prototype Design
Application
- Rail crack detection
- Rock level monitoring
- Track area monitoring